|
|
本帖最后由 ecloud 于 2021-3-4 02:44 AM 编辑
下载地址点我
详情请见:http://www.yecloud.net/ecloud/ar ... 84667b68bf4660ev0.1
安装/升级方法:
下载后缀名为.mpackage的文件
请将你原有的mudlet配置文件进行复制和备份
登陆进入一个mudlet配置文件
点击“包管理器”
卸载老的版本
点击“安装”按钮,安装最新下载的.mpackage包
配置方法:
如果有老版本,一定要在上一步复制/备份原有的mudlet配置文件,这样你就保留了老的设置信息
《基础设置》这个目录里面的东西都是你需要认真修改的,所有需要调整设置的都在这里。请依据里面的实例进行修改,pfm数据库里需要把你的技能添加齐全。所有该改的改好以后,重启Mudlet
在《pfm信息库》中,按照里面的范例,添加你所使用到的技能
在《基础环境变量设定》目录里,新建一个以你的id命名的脚本,按照示例脚本来修改符合你的设置,然后将示例脚本删除,该文件只能存在一个!
在《战斗系设置》目录中,建立以你的id命名的子目录,并且在里面添加分别适用于各个任务的设置。具体设置方法可以参考示例。注意将每个函数名后面的id部分改为你的id
其他需要修改的地方
| 触发器-job-慕容-发现家贼 | XXX发现的 - 修改这个名称 | | 触发器-job-襄阳保卫战-积分 | 修改里面的id | | 触发器-战斗-受到伤害 | 替换里面的人物名字为你的名字 | | 触发器-桃花-桃花阵 | 替换里面的人物名字为你的名字(非桃花岛不需要管) |
由于分辨率的原因,有些用户可能需要自己调整一些UI的摆放位置
打开:脚本-Bot启动脚本
可以看到目前所提供的所有bot,启动方法统一为botxxx,或者botxxx 100
很多bot都有许多可设置的变量,一定要详细设定,否则可能有重大影响
主流任务的半自动模式:
会自动走到任务所属地区,之后请自行寻找目标或者手动启用swap,比如 swap 4
任务过程自动完成,之后需要走到node节点房间,look一下之后自动返回npc
Z99的底层核心分为几大模块:Bot, Nav, Battle, Swap, xpath, *map,所有的模块都以底层函数模式存在,提供充分的二次开发接口(但是比较缺文档和注释)
Bot
用于驱动所有任务/练功的自动化脚本。拥有一个统一的入口,统一的环境变量配置,统一的启动/停止/退出流程。它本质上是一个机器人框架,便于开发者关注于业务逻辑的实现
Nav
从表面上看它是存在于界面右下角的动态行走按钮,实际上nav库提供了出口捕捉,方向长短、正反转换等基本功能,成为了swap, xpath和map的基石
Battle
这是Z99的核心战斗系统,采用面向对象的方式定义了每一个perform,并且可以灵活定制在战斗中使用的perform和释放逻辑。插件本身提供内置的5种释放逻辑:Loop, S-Loop, Bubble, S-Bubble, AAA。除此之外,战斗系统还提供先手偷袭的技能设定和被卸载武器后的备用技能设定。界面下方的四个技能按钮,是战斗系统的一个上层实现,用于手动发射技能,并提供气势和CD显示
xpath
是一个灵活的“批”行走引擎,在此之上提供了各种迷宫路径和遍历的实现。并且实际上,它可以实现按顺序,固定时间间隔的发送一个table里的指令,可中断,继续和反向。xpath以lua table文件的形式存储所录制的路径
Swap
这是一个完全跟地图和路径无关的“扫街”引擎,只要设定好半径,就可以无脑扫街。适用于小范围的遍历和跨区域遍历
界面截图
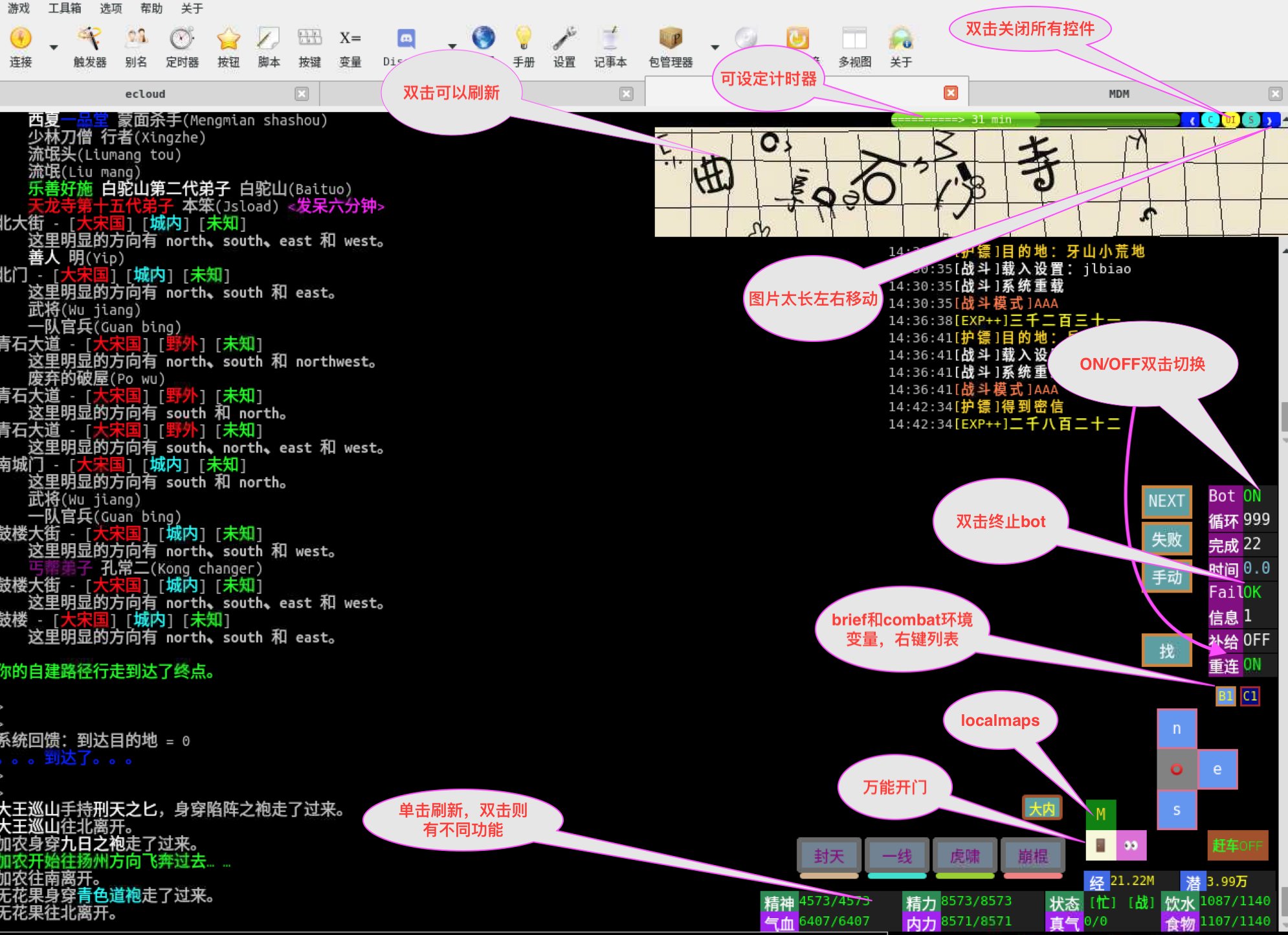
|
评分
-
查看全部评分
|



 狗仔卡
狗仔卡 发表于 2020-5-1 14:25:15
发表于 2020-5-1 14:25:15
 提升卡
提升卡 沉默卡
沉默卡 变色卡
变色卡 显身卡
显身卡 楼主
楼主
 发表于 2020-8-16 13:17:36
发表于 2020-8-16 13:17:36